
Le pilotage de ce robot avait été étudié par 6502man dans ce sujet [THOMSON] comment s'amuser avec son bras .....
Un projet de recréation de cette interface a été également initié sur le forum MSX Village mais apparemment, le stade de la récupération de la schématique à partir d'une interface existante n'a pas été dépassé.
J'ai récemment fait l'acquisition d'un bras Robotarm mais sans interface.
Je souhaite pouvoir l'utiliser à partir d'un ordinateur et l'interface pour MSX semble être la solution de référence, notamment avec le langage ROGO.
Il existe une interface pour C64, mais je n'ai pas trouvé beaucoup de documentation.
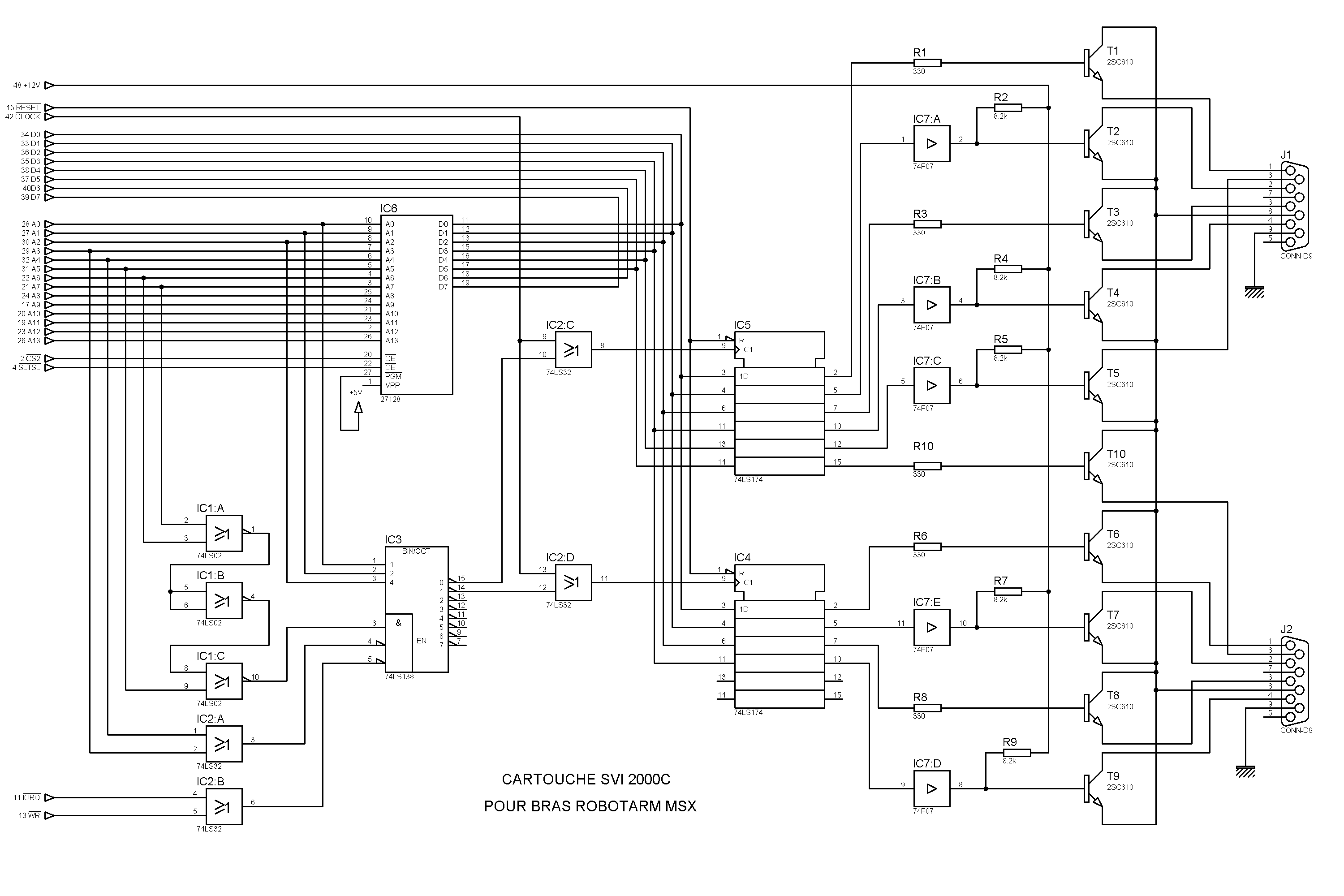
Les améliorations apportées à l'interface initiale sont :
- - sélection de la version de la ROM : MSX ou MSX 2,
- inhibition de la ROM pour programmation directe en PIO.
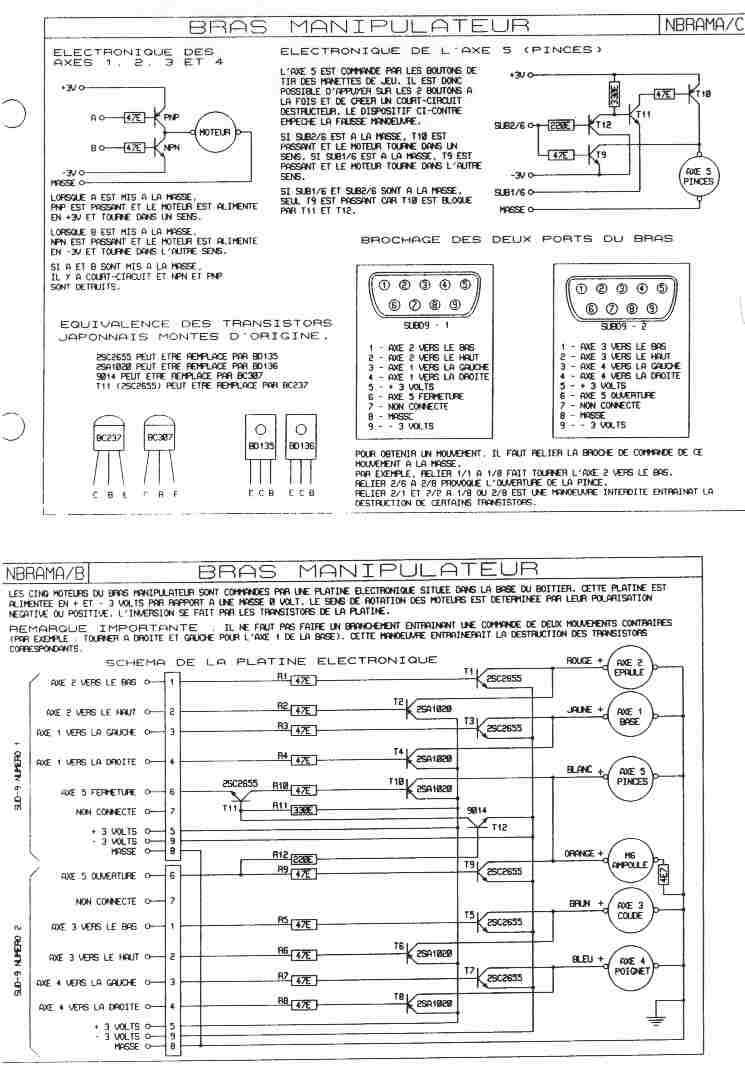
En particulier, je me demande pourquoi la broche 9 des connecteurs DB9, reliée au +3V du robot est relié à la masse de la carte d'interface (à part une erreur d'interprétation du schéma initial) : le court-circuit me semble inévitable, non ?
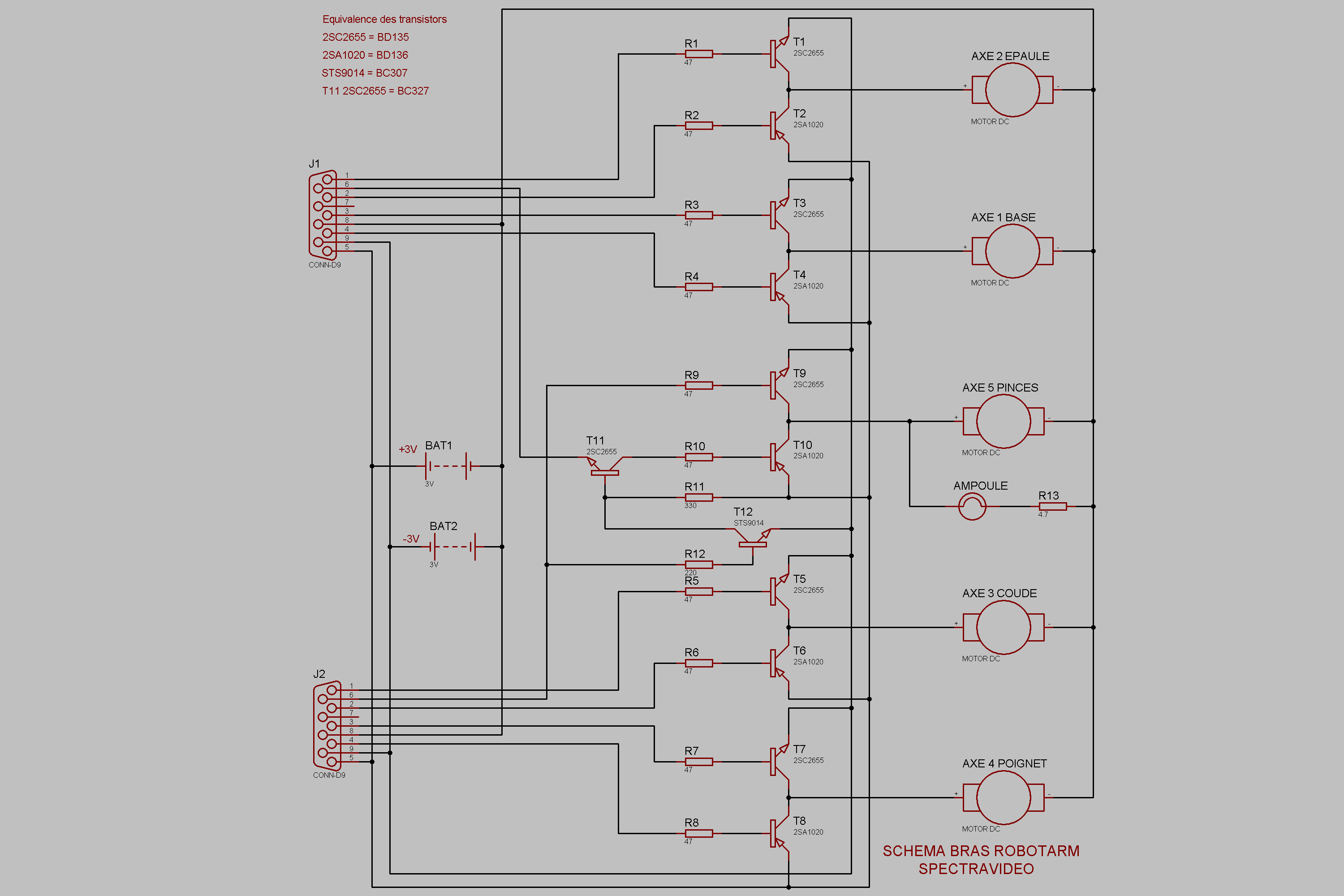
De même, pour faire fonctionner le moteur dans un sens ou dans l'autre, on alimente le moteur en + ou - 3V. C'est effectivement réalisé en reliant la broche adéquate du connecteur à la masse, via un transistor. Le transistor ferme le circuit quand un courant est présent sur sa base. Jusqu'ici, tout va bien pour moi. Par contre, un électronicien pourrait-il m'expliquer pourquoi dans le cas du -3V, la base est activée directement via un transistor 330 Ω et dans le cas du +3V, la base est activée via un inverseur à collecteur ouvert, une résistance de 8,2 KΩ et le +12V. J'avoue que là, une explication serait la bienvenue.
Voici un aperçu 3D de la carte SVI-2017 :

Merci de votre aide.


{kind=link}
{kind=link}
{kind=link}